Autonomous mobility is constantly evolving, and it will change how we get around forever.
The main goal of this thesis is to develop a solution that could detect and classify the road and objects on it, using networks with Deep Learning.
In this blog you can follow the development of my master thesis, where weekly updates will be made!
Weekly Tasks
Find more about the work that I have been doing.
Week 1 & 2
Getting started
Week 3
First Researches
Week 4
Lar meeting
Week 5
Fast.ai
Week 6
Panoramic Images
Week 7
More Researches
Week 8
Panoramic Images
Week 9
Images Classification
Week 10
Workflow and segmentation
Week 11
Jupyter and some recordings
Week 12
Panoramic Road
Week 13
Image Labelling
Week 14
Kornia WarpPerspective
Week 15
Unselecting Images
Week 16
Image gathering and setup in ATLASCAR
Week 17
Camera mounts and HUB
About
Here you can get to know more about me.
Rúben Costa
Mechanical Engineering Student
My name is Rúben and I am a student of Mechanical Engineering at the University of Aveiro in Portugal.
I am an enthusiast of motorsport and autonomous mobility and I am also the Team Manager of Engenius, the Formula Student team of the University of Aveiro.
I enjoy working as a team and try to explore innovative ideas with the goal of making a difference.
Week 1 & 2
Getting Started.
On these weeks I started by installing the ROS environment and doing the tutorials present in this link to prepare a workshop given by Professor Miguel Oliveira.
In the workshop he showed us the ROS environment and we played a team hunting game where each person had a player and belonged to a team.
During the game, players from the blue team had to hunt those from the red team, red team had to hunt the members of green team and green team had to catch up the blue ones.
In this workshop we used Python2 for programming our players, and used GitHub to work in a corporative environment. After we had fun playing some games, Professor Miguel Oliveira showed us some projects where he used ROS.
I also have been writing a preliminary report for my dissertation, where I read about the work that had been done by previous students and also started to explore a litle bit more about Deep Learning.
At the end of the week I had a meeting with Professor Vítor Santos, where we discussed some points about the preliminary report and the first steps to take.
Date: 23 February 2020
Week 3
First Researches.
On this week I kept researching more about the past projects at LAR and other projects that use neural networks on panoramic images.
I just wrote the preliminary report where I defined the main requirements in terms of hardware for classifying images in real time and also mentioned some networks that I might try for the classification process.
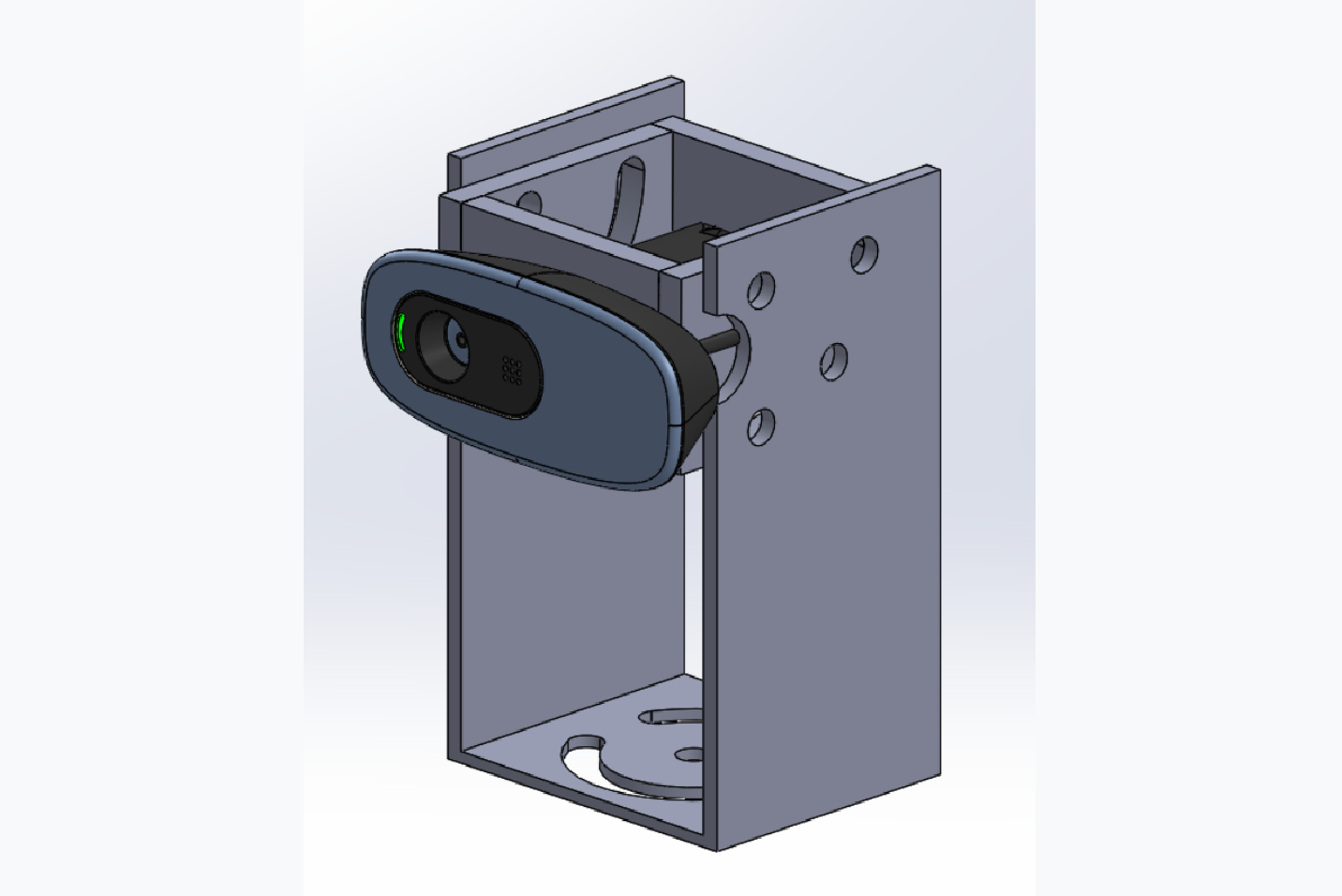
I ended up developing some stands for the positioning of the cameras as you can see on the image bellow.
Date: 27 February 2020
Week 4
LAR Meeting.
This week I've been making the last adjustments to the stands for positioning of the cameras, and it ended up as shown on the picture bellow.
I also tried to pass the images from the cameras through ROS topics at the same time as I prepared the LAR Meeting, where I and some colleagues had to present our thesis subjects and the work that we have been doing.
Date: 5 March 2020
Week 5
Fast.ai
My main focus for this week was to explore more about Deep Learning. For it, I used Google Colab to keep doing the Fast.ai pratical Deep Learning course and trained a model with a simple dataset that I create with internet images.
With the training of this dataset I was able to learn more about terms such as learning rate and its influence on the training of a model, and I also became more familiar with some interpretation techniques, like using confusion matrices to find were the model performance was lower.
Date: 12 March 2020
Week 6
Panoramic Images.
The initial objectives for this week were continuing to improve my knowledge about Deep Learning Networks with the fast.ai course and to do some tests with panoramic images on the outside.
For that, I started with the second topic since a LAR researcher had already developed a ROS package to obtain panoramic images.
Briefly, this package package subscribes to images of different ROS topics and creates a panoramic image, which is published in a ROS node.
In order to create the panoramic image, the program tries to find features in the images and compare the keypoints of those to create the transformation matrices of the lateral images.
The process to identify the keypoints of the images is only executed while there are no transformation matrices associated to the left and right images. After the matrices are defined, the program uses these matrices to apply the transformations to the images that the cameras acquire.
After making the necessary changes to the package, I did some tests at home and since the access to the university is restricted due to the outbreak of Covid-19, I decided to mount a system to position the cameras in a car with similar dimensions to the ATLASCAR2.
Bellow you can see different setups that I tested to evealuate if there were any differences between the panoramic images in different situations. As I expected, the third setup was where I got better panoramic images and so I ended up making a more robust setup to be able
to drive the car while images were collected, as you can see in the fourth image.
In the following videos you can see the images to be captured while the car is moving and all the videos were recorded with the setup shown above. During the recording, the framerate of the panoramic image droped to 2 FPS while normally I could capture images at 6 FPS.
To increase the framerate I have to try to parallelize the processes that apply the transformations to the lateral images.
With all these tests the time to continue the fast.ai course was not much and so I didn't make much headway over the last week, even so it was quite useful to make these experiments to understand how the panoramic images that are obtained with this package will be useful and
to better understand what will be some constraints of the assembly of the cameras.
Date: 19 March 2020
Week 7
More Researches.
This week I started by researching how to parallelize the program to create the panoramic images
in order to increase the frame rate with which the images were published in the ROS topic. Once the code is in Python, the
first attempts to use multiple computer processors were in this code language.
After some research and some unsuccessful attempts
I began to realize that it would be a little more difficult than expected to adapt the program to do the processing of images in multiple cores.
Therewith I talked to some colleagues to try to understand what I might be doing wrong and they advised me it would be easier to do it
in C++. With this, at the moment I am passing the previous program to C++ to then implement multi-core processing.
During this week I was also able to continue the fast.ai course where I started to explore some image segmentation.
I recently decided to start writing a notebook where I've been writing what I'm learning with the course and some code snippets that may be important later on.
Next week goals are to finish converting the panoramic images program to C++ and explore its multi-processing to see if we can increase the frame rate of the images
and also to go as far as possible in the course to start trying to apply the concepts to the images.
Date: 26 March 2020
Week 8
Panoramic Images.
As mentioned in last week's post, this week I continued to convert the panoramic imaging program to C++ to see if we could get a bigger framerate.
After completing the conversion I tested different scenarios to see which one was more favorable to us and the values of the framerates in each situation are below.
Language
Framerate [FPS]
C++
5,109
C++ with #pragma
5,804
Python
5,601
With these results we can conclude that the conversion to C++ has not become as beneficial as expected however, before leaving the idea of classifying the panoramic
images I may try to find some more solutions in the next few days but if there is no viable solution I will have to explore a solution where the the first thing to do is
the segmentation and after that create a road map mixing up the information of all cameras. You can see a similar solution on the video bellow.
During this time, I also made some test with different amounts of lighting to understand if there was any influence on the speed of image capture.
I ended up testing two different scenarios, the first one with the cameras pointing outside during the day and the other at night. The images below were the two scenarios tested and
while on the left one I managed to capture images to a framerate of 29 FPS on the other I only managed to get a framerate of 15 FPS.
This is due to the fact that when the environment is darker the exposure time that the camera needs to capture a image
is bigger and with that the framerate cannot be the same as in a brighter environment. Therefore, for testing during the day we should not have problems
with the framerate but if we want to test in places with low light we will be limited to 15 FPS.
Date: 2 April 2020
Week 9
Images Classification.
As we saw last week, we couldn't get the framerate needed to have the real-time panoramas, which led to slight changes in the thesis.
So, this week I focused on exploring the classification of the images individually, applying some of the knowledge that I acquired with the fast.ai course.
I used a Resnet34 network and trained it with the Camvid dataset and then applied the trained network to some images.
The results obtained were not very satisfactory as you can see in the images below.
The next step at this point will just be to focus on identifying the road or the lines that limit it in individual images,
exploring different datasets and other types of architectures to define the one that best fits our problem.
Later I should explore the concatenation of the road identified in the different cameras to obtain what will be a panoramic image.
Date: 9 April 2020
Week 10
Workflow and segmentation.
This week I will start to explain the workflow of the program that makes the image segmentation and
after that I'll show you some of the work I've done over the week.
Workflow
Image capture
Extrinsic Parameters Calculation
Image Segmentation
Transformation of segmented parts into polygons
Representation of all polygons detected in a panoramic image
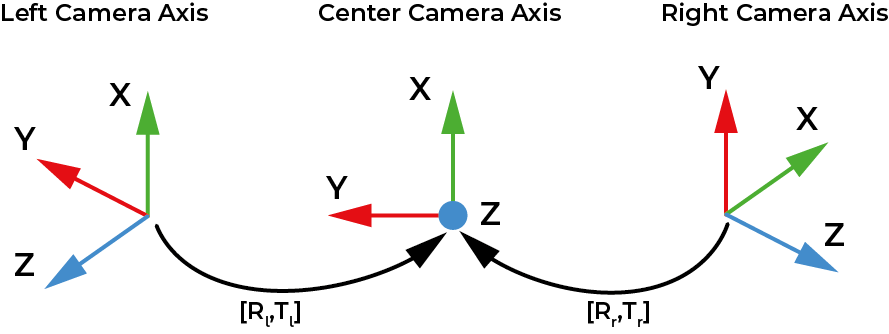
As you can see in the diagram above, the first task the program does is to acquire
the images from the three cameras and then publish them in ROS topics. After that, the program calculates the transformations
from the lateral images to the central one through the keypoints it finds in each pair of photos. This task is used to transform
the perspective of the polygons. The third and fourth task makes the segmentation of the image and converts the result of the segmentation into a polygon.
In the last task the transformations calculated in Task 2 are used to represent in a panoramic image what was detected and its location.
Training Process
Next I will show you some of the work I have done this week, which follows in part what was explained in the previous section.
Before proceeding with the image segmentation, and not having achieved the desired precision with last week's work, I ended up training the network again.
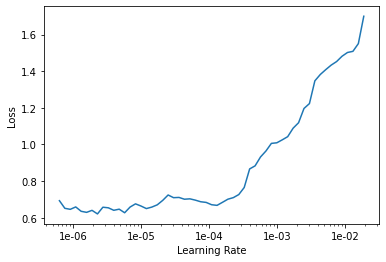
Learning Rate
First, we loaded the parameters of the trained model last week and tried to find out the best learning rate to train our model.
After analyzing the graph, I ended up choosing a learning rate of 3e-5 and trained the model during 10 epochs.
Training
In the table on the left, we can see the evolution of accuracy and losses during training.
The values in the 2nd and 3rd columns correspond to the loss values in the training dataset and the
validation dataset, respectively. In the 4th column are the precision values, which in this case are measured by
dividing the number of correct pixels by the total number.
epoch
train_loss
valid_loss
acc_camvid
time
0
0.576482
0.372720
0.894483
06:53
1
0.510138
0.363434
0.895801
07:02
2
0.459025
0.346925
0.900112
07:03
3
0.497980
0.330292
0.904698
07:02
4
0.492121
0.372894
0.895368
07:02
5
0.438139
0.325402
0.908062
07:02
6
0.439658
0.340307
0.901518
07:02
7
0.400334
0.361814
0.902252
07:01
8
0.362851
0.311068
0.907501
07:02
9
0.309660
0.287874
0.914652
07:02
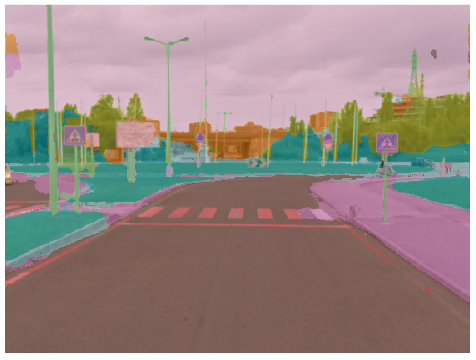
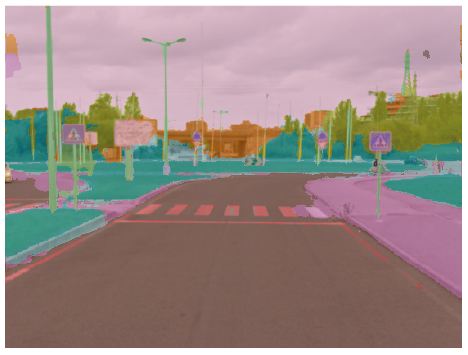
Image Segmentation
Image 1
Image 2
Image 3
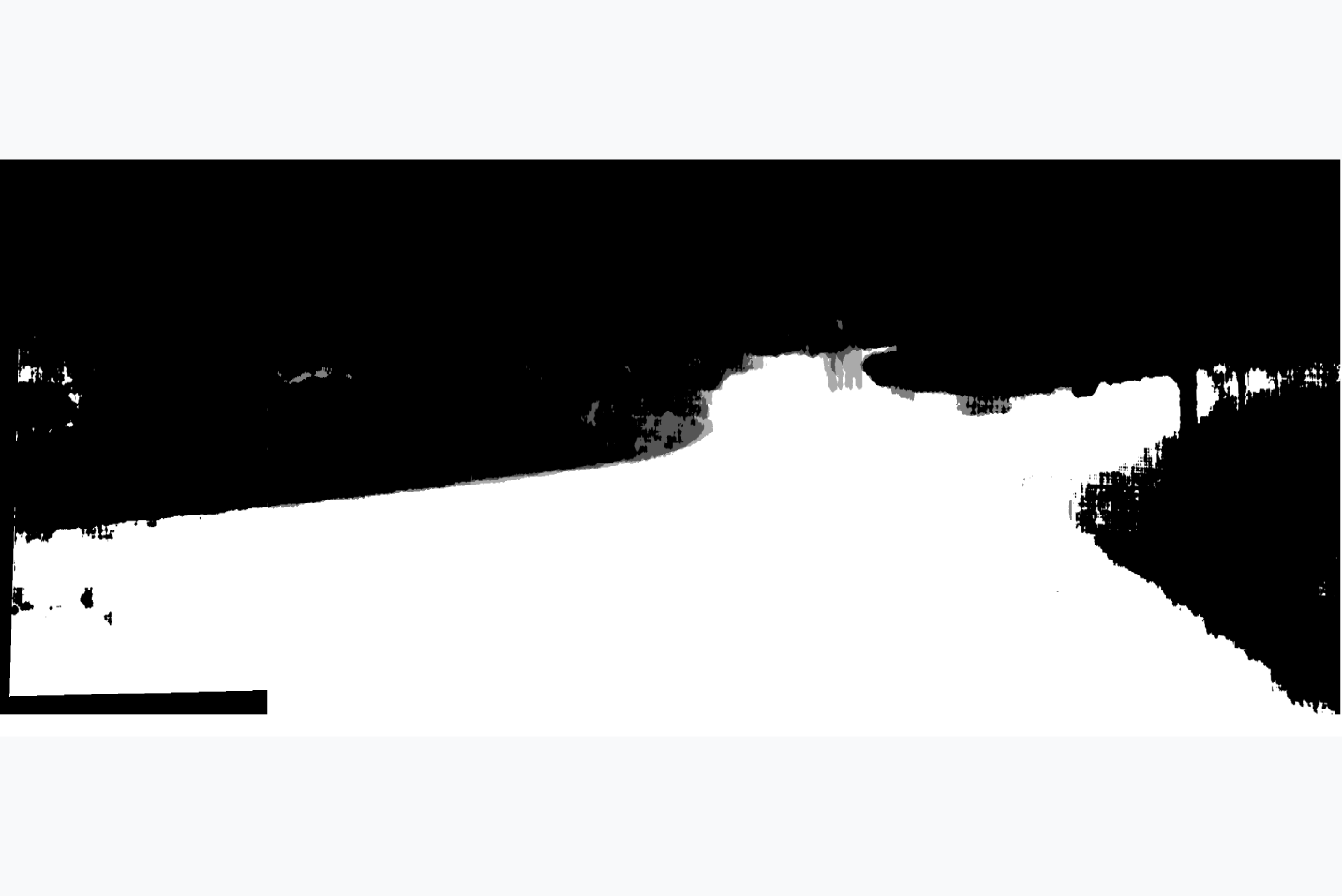
As we can see, and compared to last week, this week's results were far superior.
This was because we trained all the layers of the model which led us to obtain an accuracy of 91%. The upcoming work will
be focused on trying different datasets and improving the accuracy of our models.
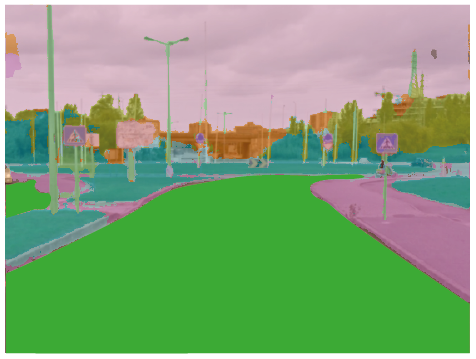
Road & Lane Marks
Image 1
Image 2
Image 3
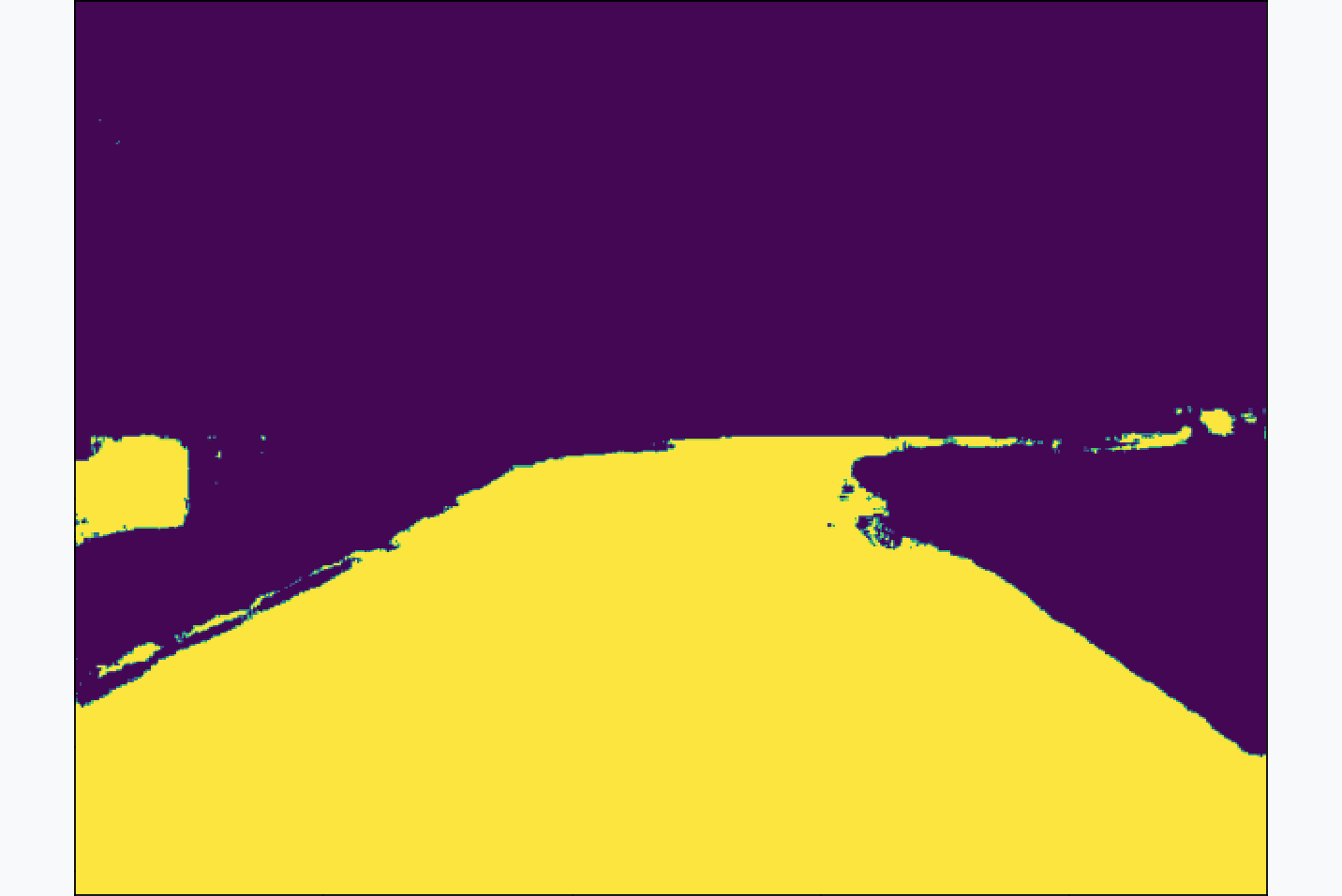
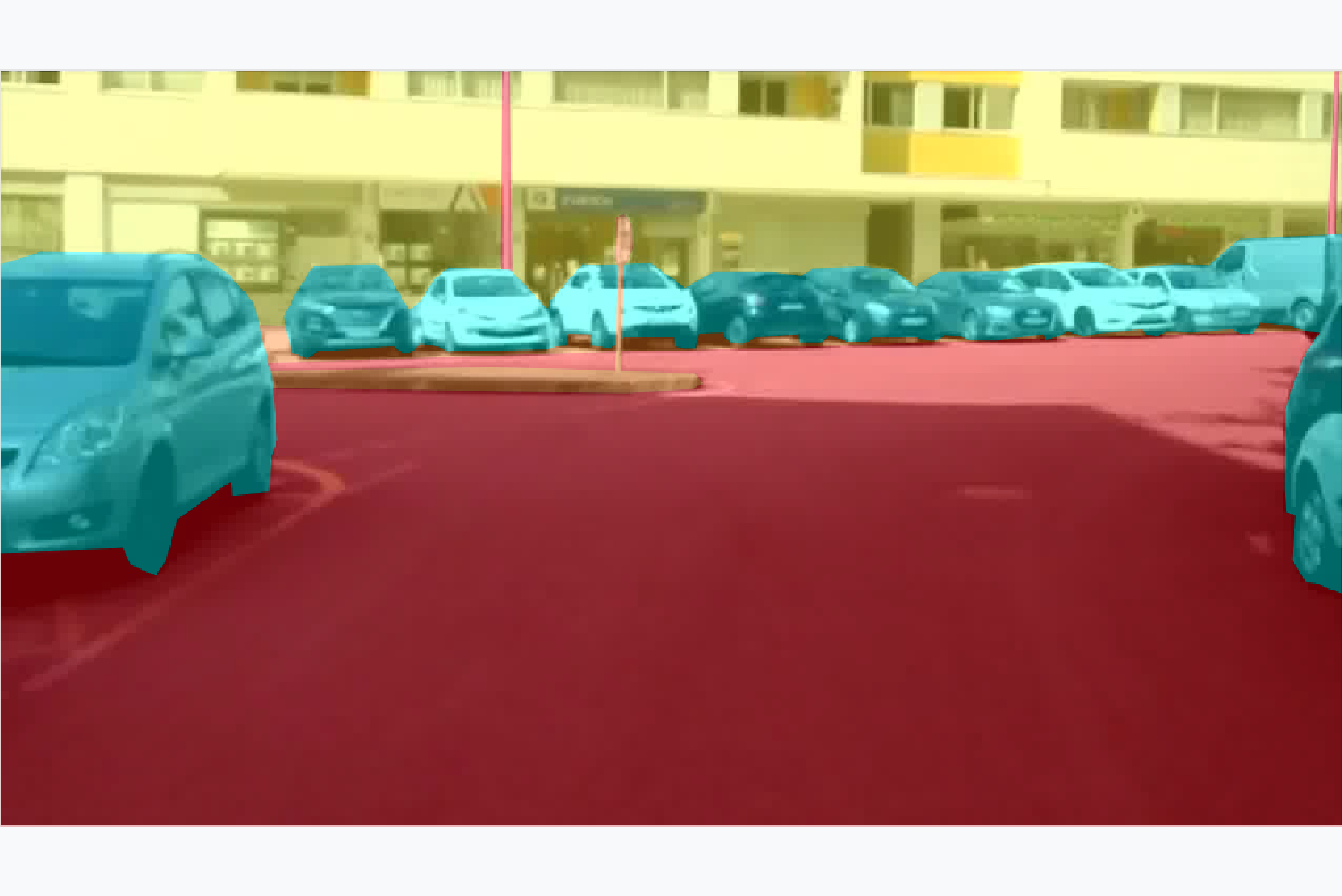
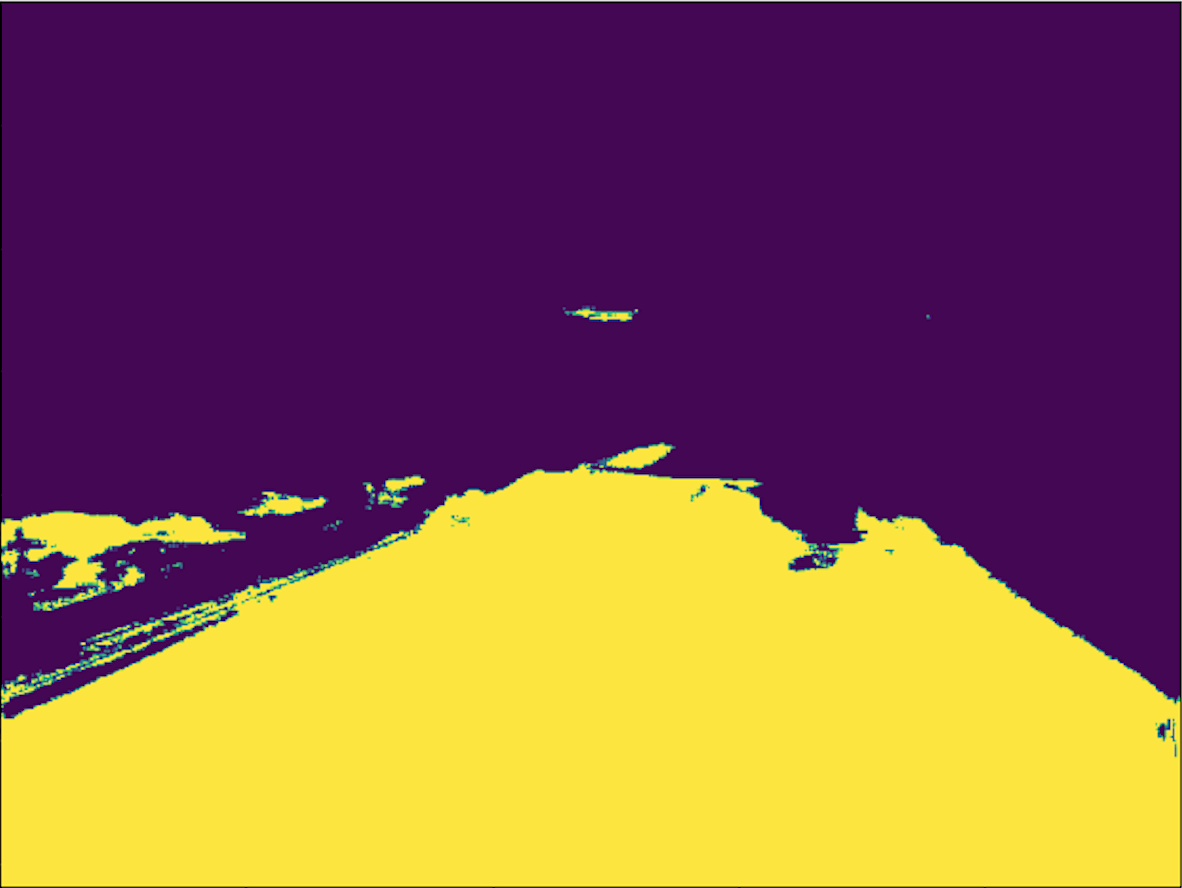
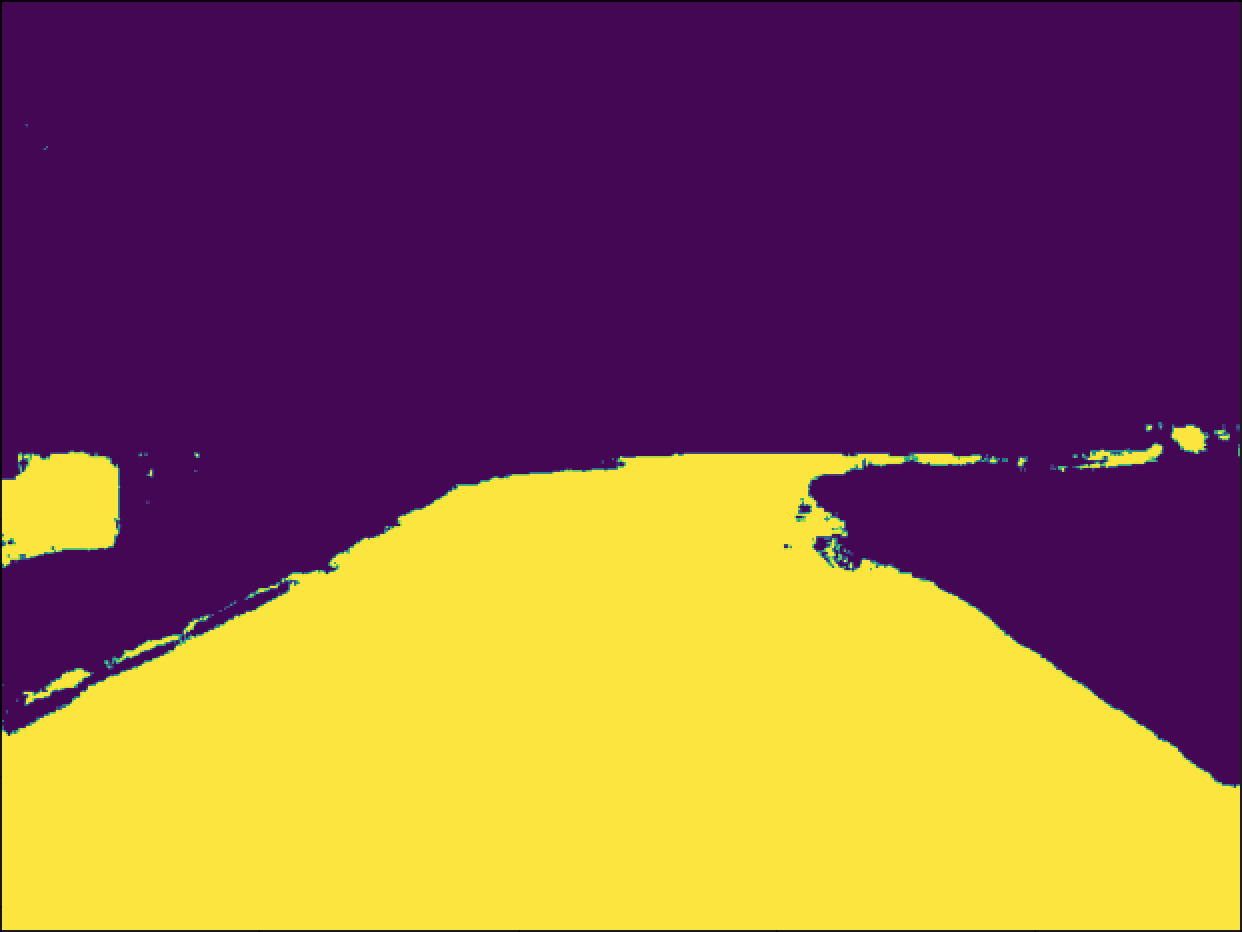
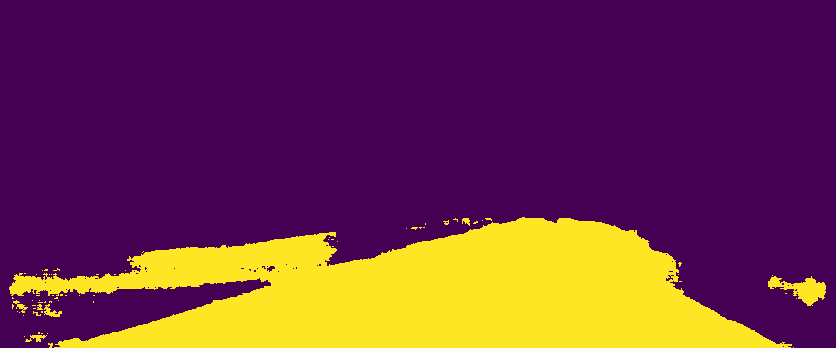
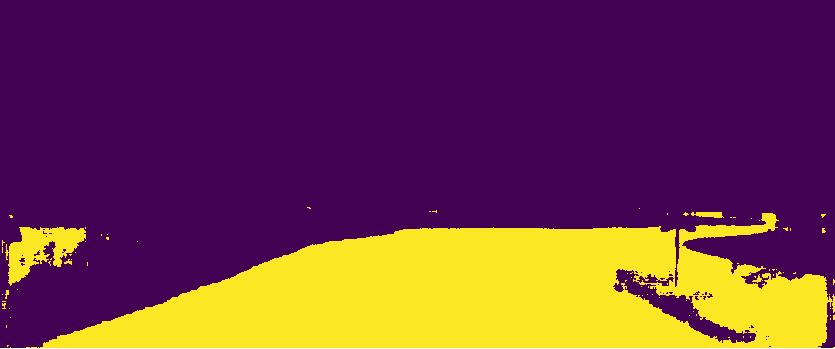
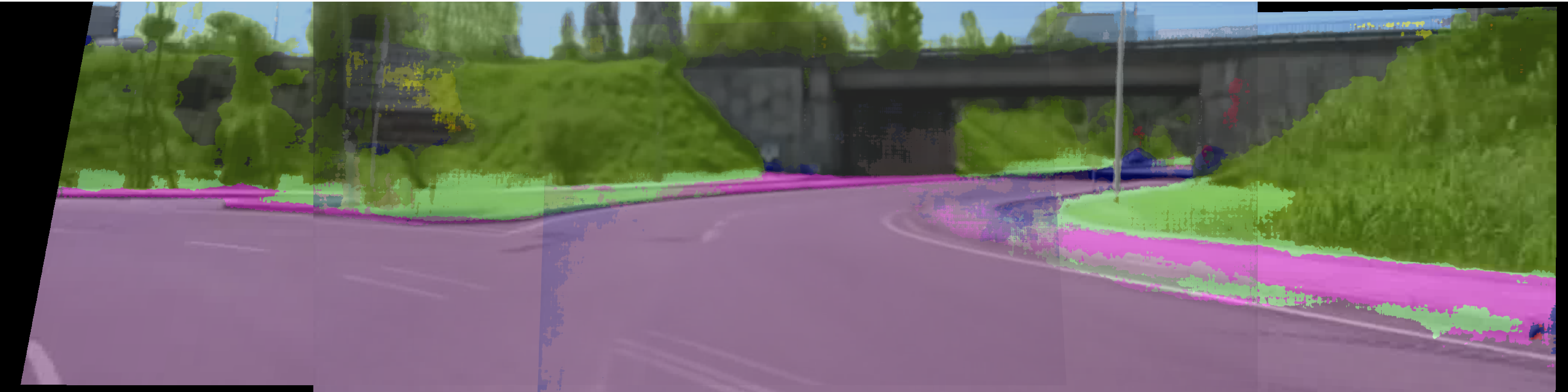
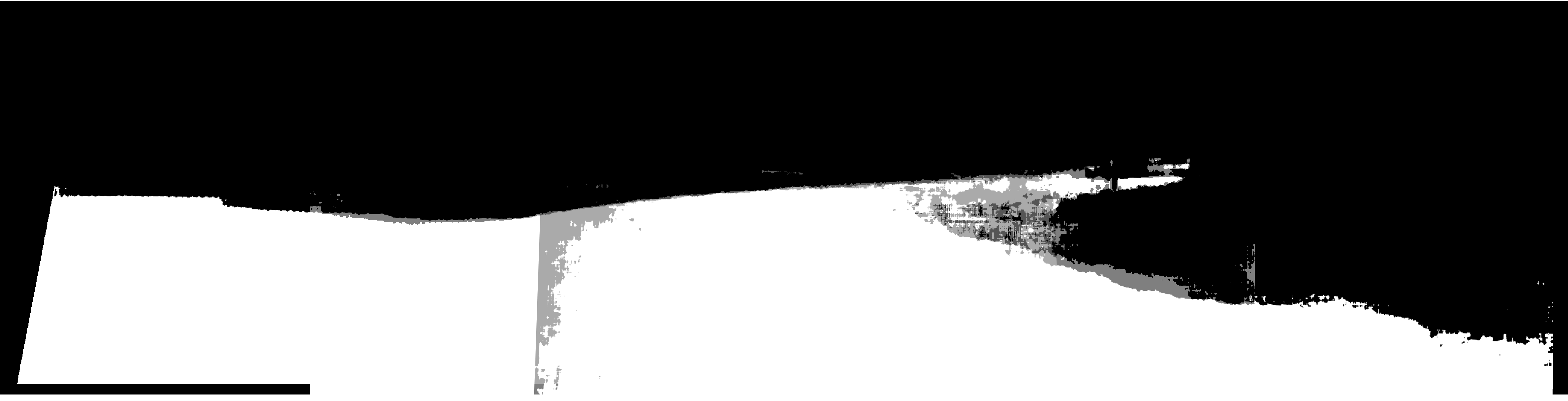
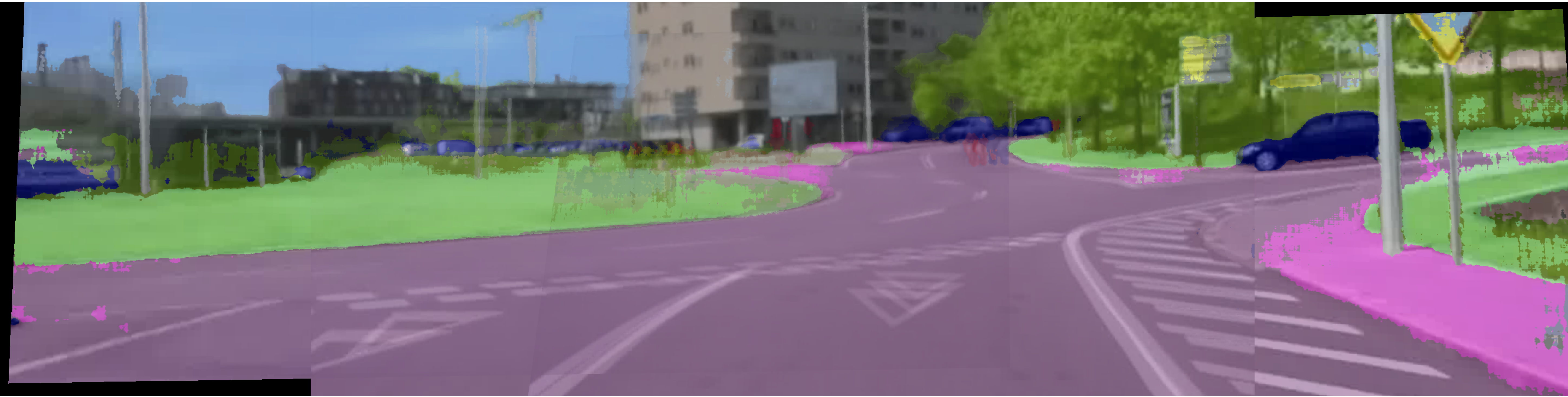
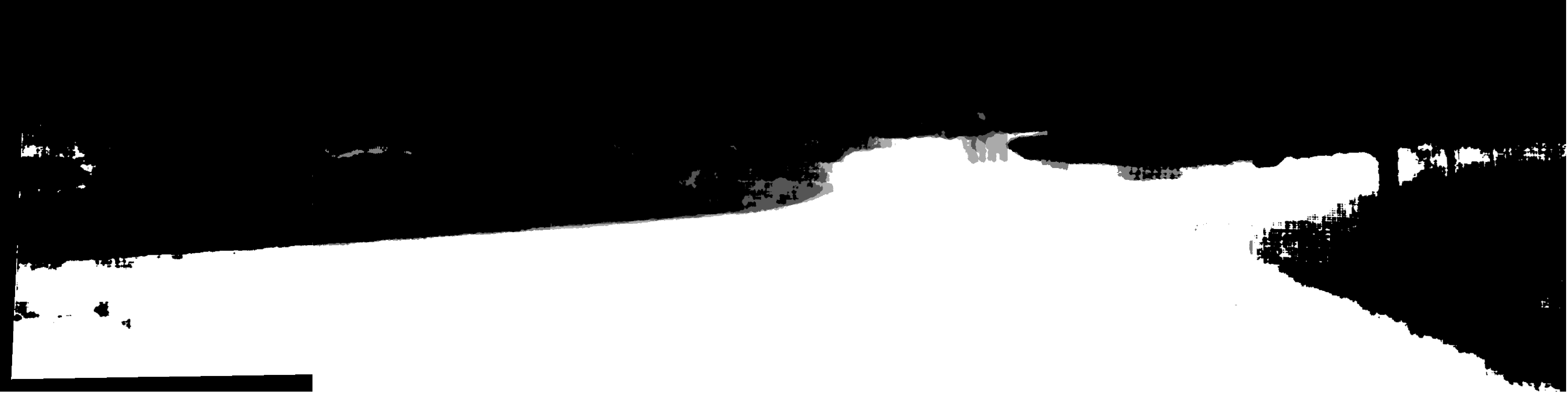
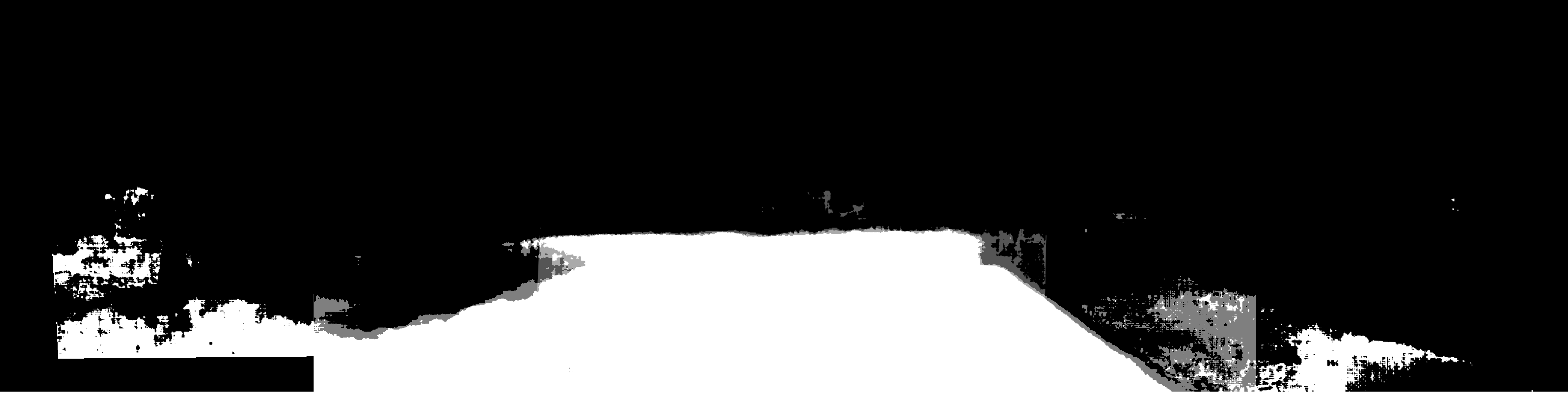
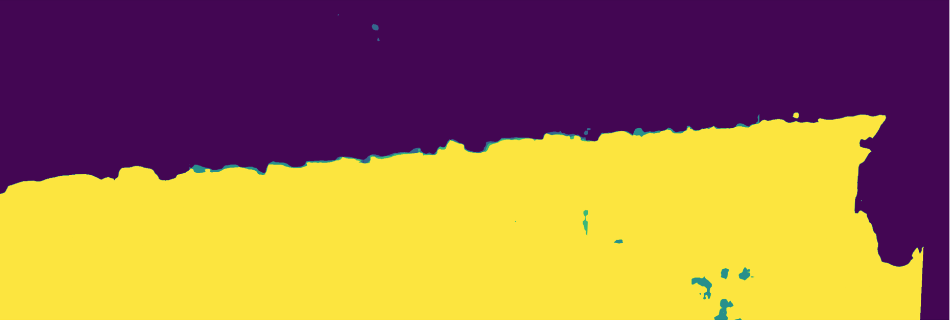
After having performed the segmentation of the individual images,
I proceeded with the conversion of the areas that interested me.
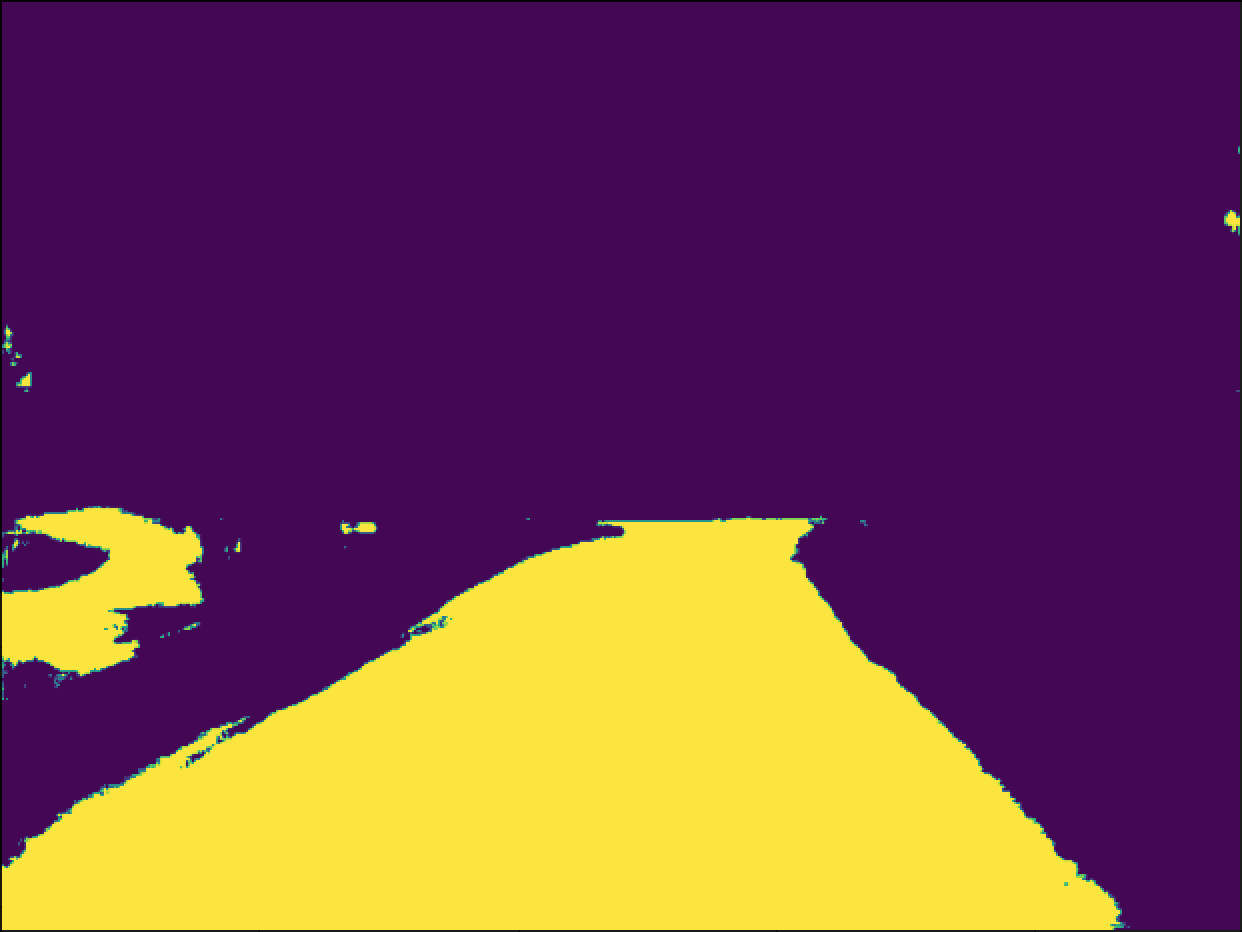
At the moment, I only focused on the classes that include road and lane marks, and through the tensors
of the segmented images I was able to see in which pixels these classes had been detected. With this,
I created an array where the regions where the car can drive are represented by the yellow ones
in the figures above and the sections that we are not interested in at the moment represented in purple.
Date: 17 April 2020
Week 11
Jupyter and some recordings.
This week's work had as main goal to make the change of programming environment from Google Colab to Jupyter.
This transition is due to the fact that there is a network training unit in the department and so we can take advantage of its computational power.
Other tasks I did during this week were to collect images to use after training new models and start defining the structure of my thesis.
Some of these processes will be detailed below.
Image Gathering
The first task I performed this week was the collection of images by the city of Aveiro.
To store the images I launched a program that created several ROS topics with the images and saved the messages sent by the program to a bagfile.
After creating several bagfiles driving around the city, I extracted the results of each one to frames and noticed that the publication of the
images was not synchronized and slower than usual, as you can see in the videos below.
I ended up analyzing the possibilities that led to this loss of frames and synchronism and I realized that by launching the bagfile recording, the framerate of the cameras dropped.
After detecting this problem, I changed the way I captured the images, ending up recording a video directly from each camera. You can see bellow the videos from the last experiment.
Transition to Jupyter
As I mentioned before, this week I changed the programming environment to jupyter and for that I asked a researcher from LAR, who was responsible for
the assembly and configuration of the new laboratory AI computer.
As one of his last works focused on image segmentation, I ended up exploring a bit what he had
already done, to adapt faster to jupyter. So I started by doing some experiments with the models he had already trained and you can see in the following images a comparison with the results obtained in the previous week.
Image 1
Image 2
Image 3
The architecture of the model I used to compare with last week's images is an ENET that was trained with the Berkeley DeepDrive dataset,
and to make the segmentation of the images used in the previous week I had to make a resize to the images as you can see.
Comparing the two models I noticed that in the second image the model from the previous week had better results, however in image 3 the new model got more details and
in the second one it was able to detect the road with more depth.
Date: 24 April 2020
Week 12
Panoramic Road.
After I made the move to the jupyter last week, during this week I focused on generating panoramic images after the segmentation of the individual images.
Another task I did this week was to define an initial version of the "skeleton" of my dissertation.
Creation of segmented panoramic images
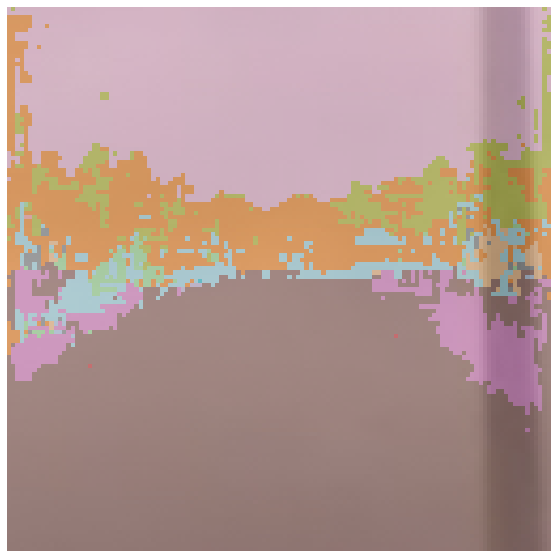
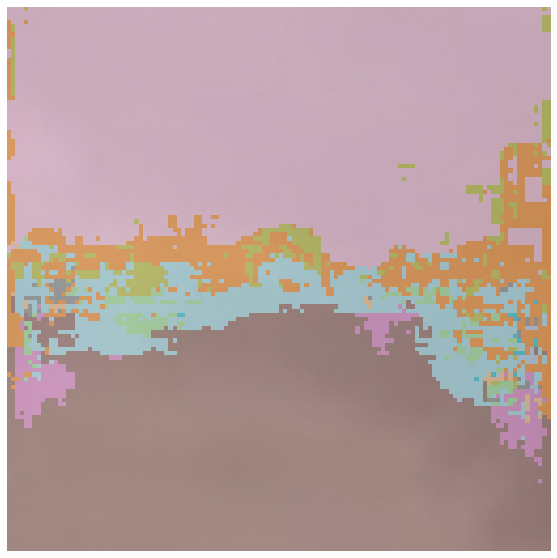
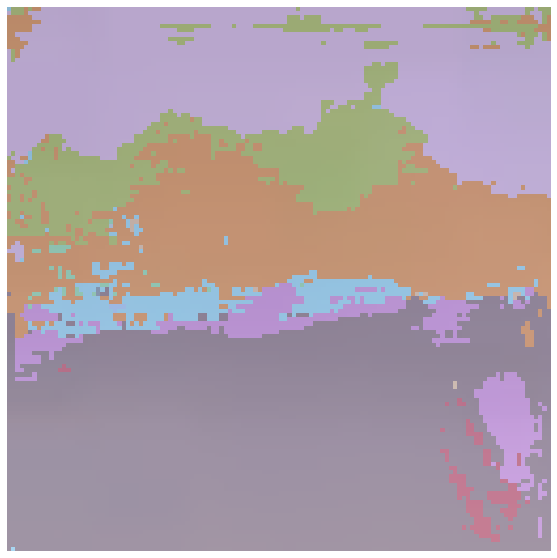
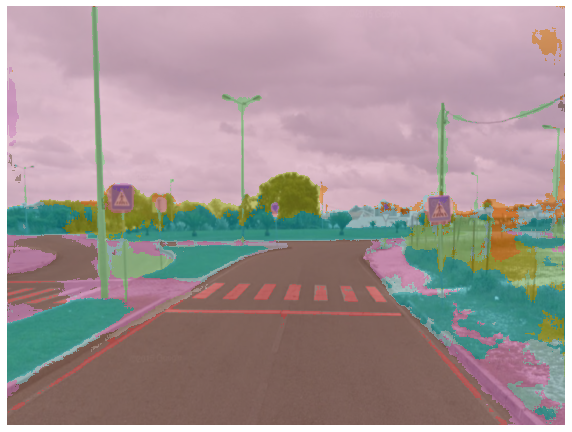
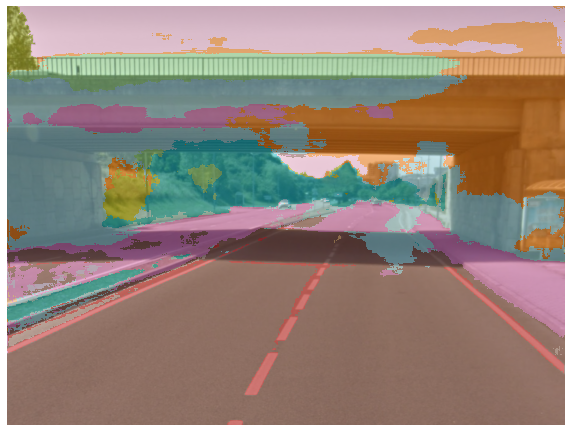
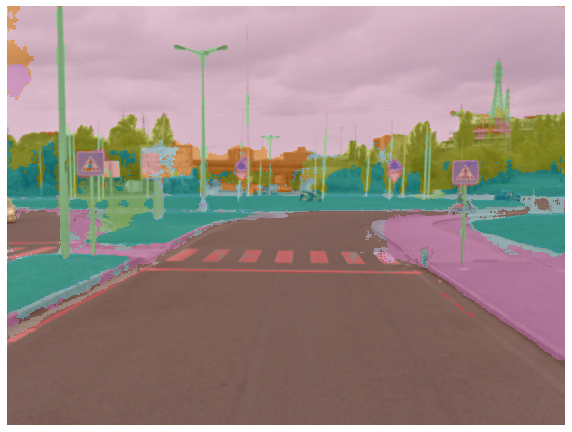
Since last week I ended up collecting videos around the city of Aveiro, this week I focused on the segmentation of those images and the subsequent creation of the panorama.
With this, I passed the videos to frames and then applied several models that were already trained. You can see below the segmentation of some of the images collected.
After I segmented the individual images, I adapted the code for creating the panoramic image used in week 6 to
create the panoramic images. As soon as I got the panoramic images already segmented, I tested several models
to realize the quality of their segmentation. Bellow you can compare the results obtained with three trained models.
Model: Enet trainded with BDD100k
Model: ContextNet trainded with BDD100k
Model: ContextNet trainded with BDD100k Version2
Comparing the results obtained with the different models we can see that in
some cases they are quite similar, which makes it difficult for us to identify the one with the best results.
In order to simplify this task we should create a test dataset with images of Aveiro, and since we collected images last week,
we will have to label them with a tool like Labelbox. After that, we will be able to detect among the various trained models which of them has the best
performance in the streets of Aveiro.
Date: 1 May 2020
Week 13
Image Labelling.
I started this week doing some image labeling on LabelBox.
I also collected some images since the previous ones were not the ideal ones to evaluate the models later.
Besides that, I started to develop the LedNet model and started writing my dissertation.
Image Labelling
Before collecting new images, I started to try LabelBox to do some image
labelling and realize how much time I will need to make a small dataset for evaluation. I ended up segmenting
5 images, one of which is represented, and it took me about 1h30m. With this experience, I can realize
that this process will take some time and so I will have to save some time to do it.
Image Gathering
To acquire new images I had to create a program in python in which I could
give a trigger to start recording videos since in the last collection I had used a slightly different method.
In addition, to collect the images with higher quality I had to use a computer with 3 USB ports since to pass
the images at 720p, the hub could not pass 2 images simultaneously. To collect the images, I also ended up
changing the setup on my car a little bit, so that it was more robust and organized.
Other Tasks
Other tasks I started to perform this week was developing the LedNet model in
order to train it and try it out in the future and the beginning of the writing of my dissertation.
Date: 8 May 2020
Week 14
Kornia Warp Perspective.
This week's work included continuing the writing of the dissertation and creating the overview with kornia.
Kornia Warp Perspective
Kornia is a computer vision library for PyTorch and have modules to solve generic computer vision problems.
With this, I ended up changing the function for creating the panoramic image in order to take advantage of the use of the functions that
exist in this library.
I also applied some gaussian filters and other techniques to smooth the output and eliminate meaningless detections as you can see in the images below.
Date: 15 May 2020
Week 15
Unselecting Images.
As mentioned two weeks ago, there will be a need to find out if
the model we have can adapt to panoramic images and to the roads of Aveiro. With this, we have to
proceed to the choice of the images collected in order to create a small dataset with annotated
images of the city of Aveiro, with which we can proceed to the validation of the model in these
conditions. This week I explored a possible selection of these images using their comparison through
the extraction of their embeddings. With this technique we would be able to select the most
representative and distinct group of images, which would lead to a better evaluation of the models.
However, it was not possible to reach a solution to make this kind of selection during this week,
and due to the time that remains, I should opt for a manual choice solution, with the note that
the method mentioned earlier would be more indicated.
Date: 22 May 2020
Week 16
Image gathering and setup in ATLASCAR.
This week we intended to collect more images in order to have a
greater variety of images of the streets of Aveiro, and thus make a selection of which we will
do the labelling. The purpose of this collection would also be to provisionally mount the cameras
in the ATLASCAR and find out what their best positioning is. In order to prepare the collection
in the ATLASCAR and to make sure that there was no problem with the operation of the programs,
I ended up collecting some images from 3 different routes in Aveiro with the setup that I had
installed in my car.
The next day, I went with Diogo to the university and we positioned the cameras in the ATLASCAR
before proceeding with the collection of more images. After the setup, I started by trying to do
some recording tests but the HUB we have in the car didn't allow us to collect all the images with
a resolution of 1280x720 pixels. This is a bit strange since the HUB should allow up to 5Gbits/s and
by collecting each image at a framerate of 30 fps we only reached about 0.7Gbits/s for each image.
Date: 29 May 2020
Week 17
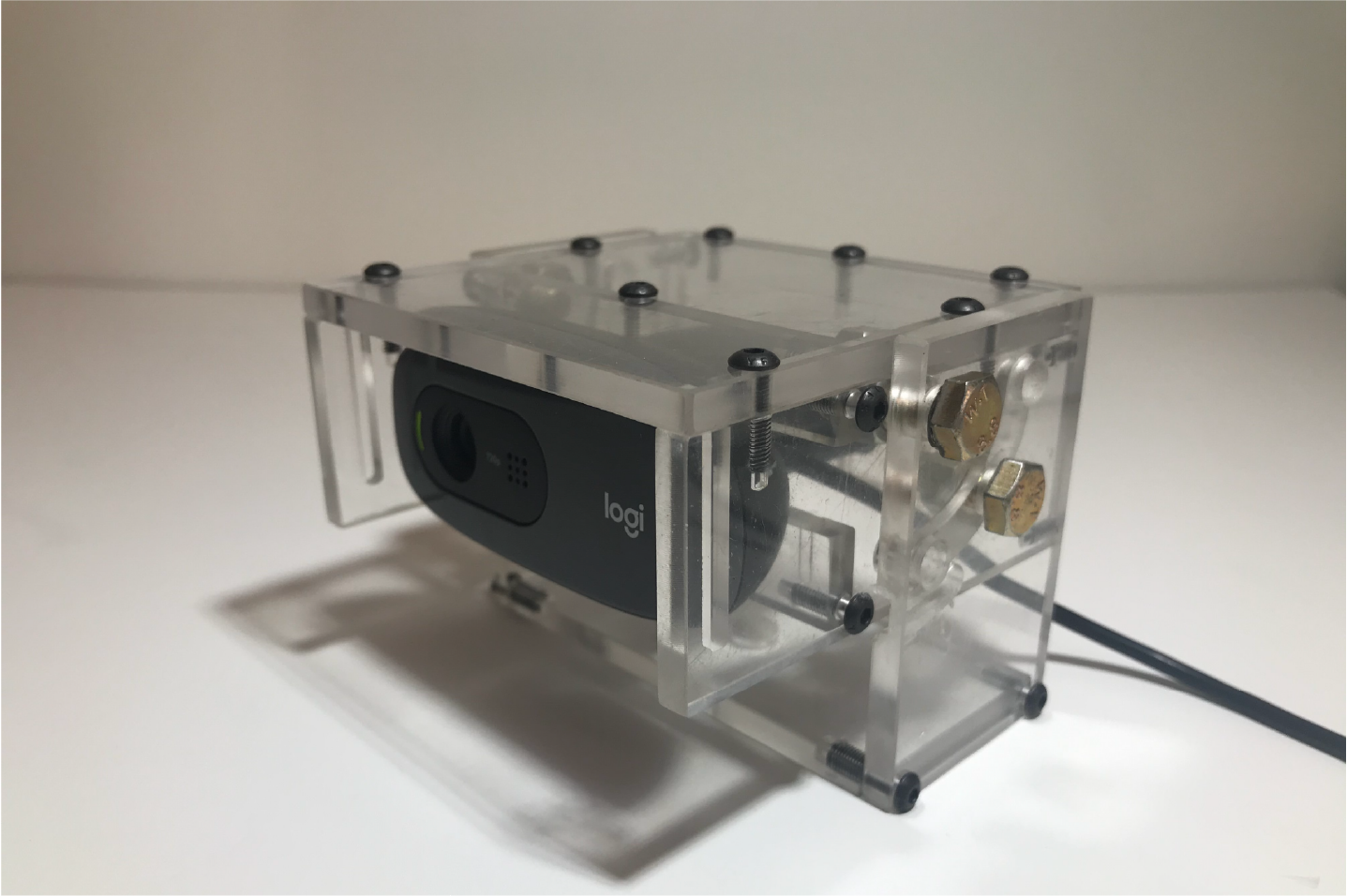
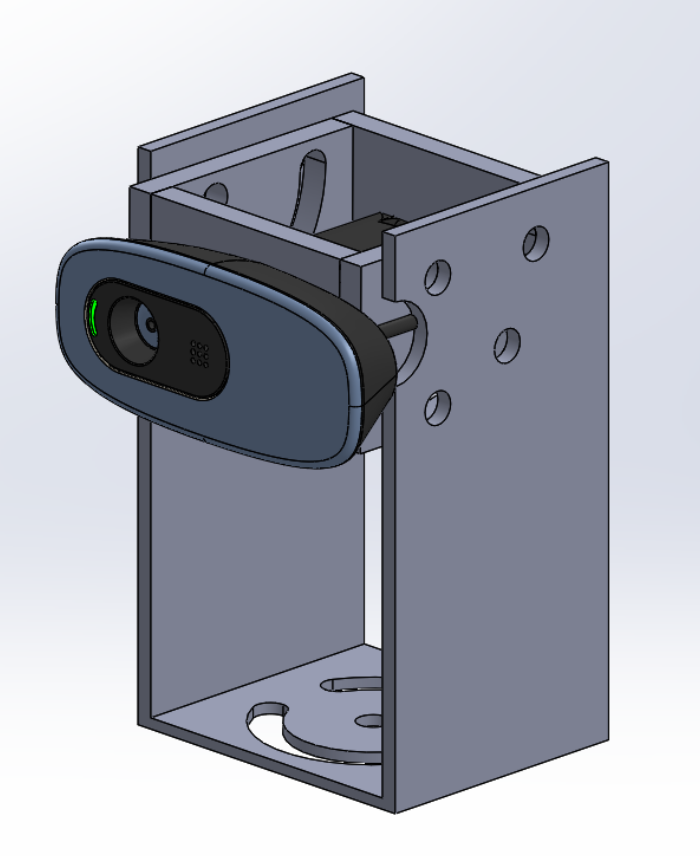
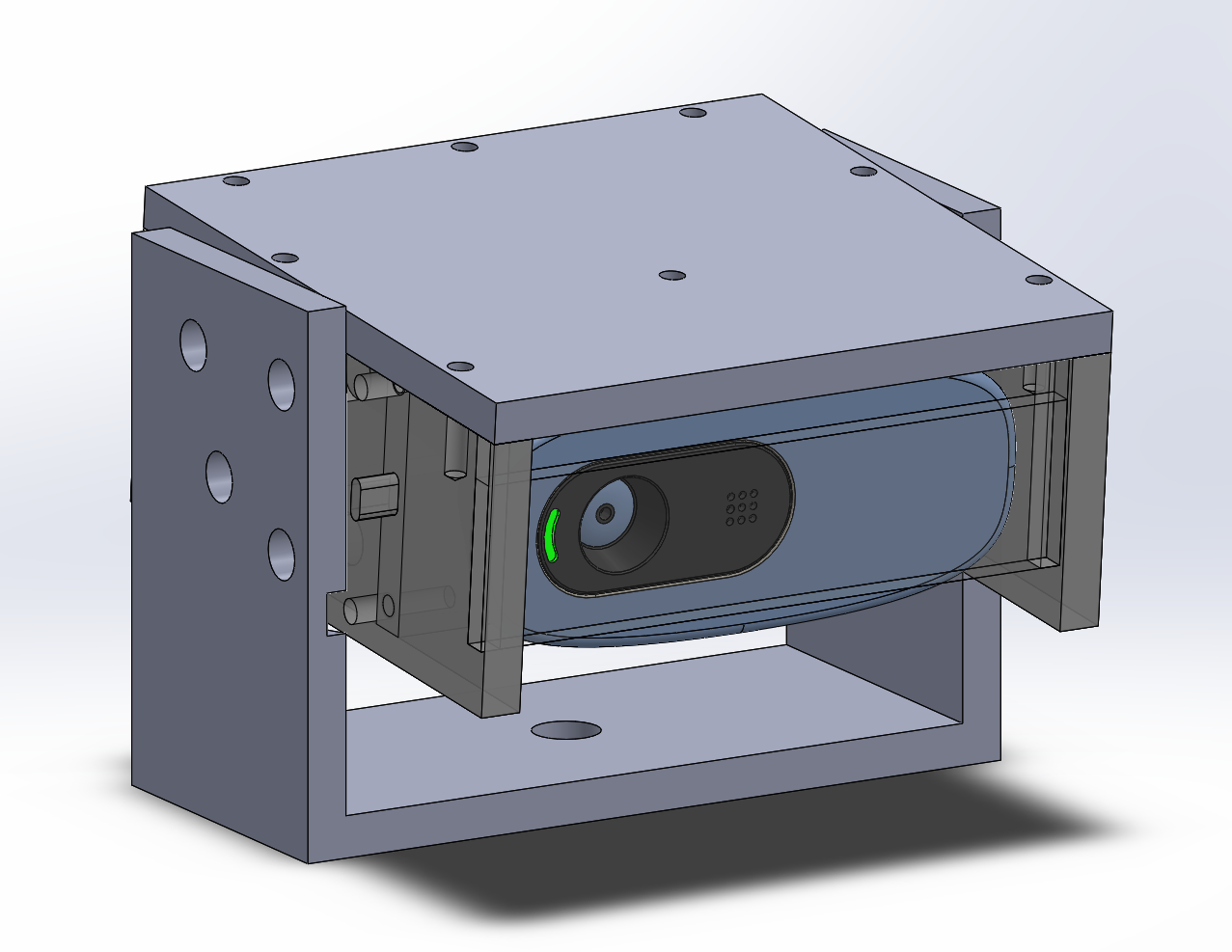
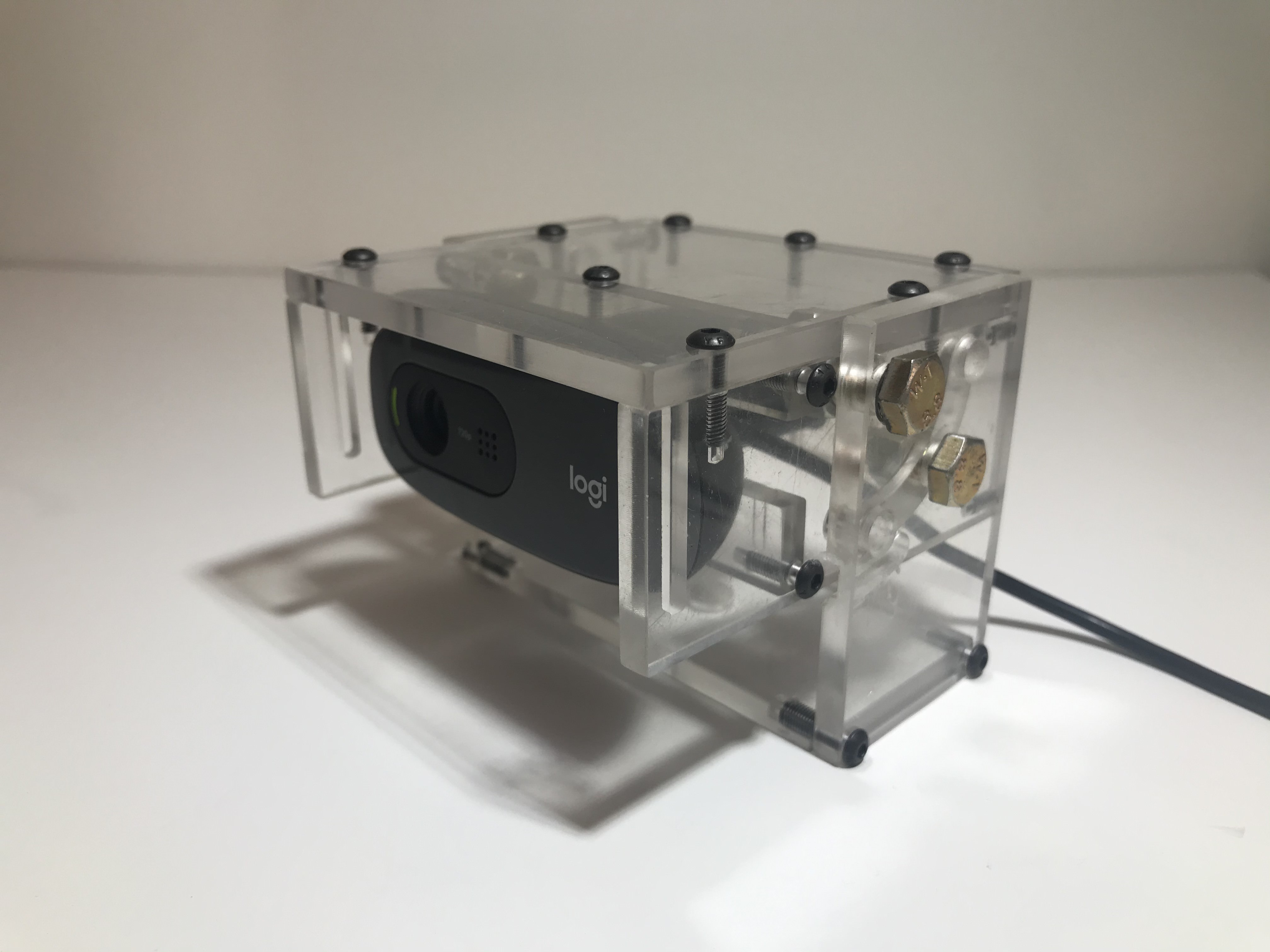
Camera mounts and HUB.
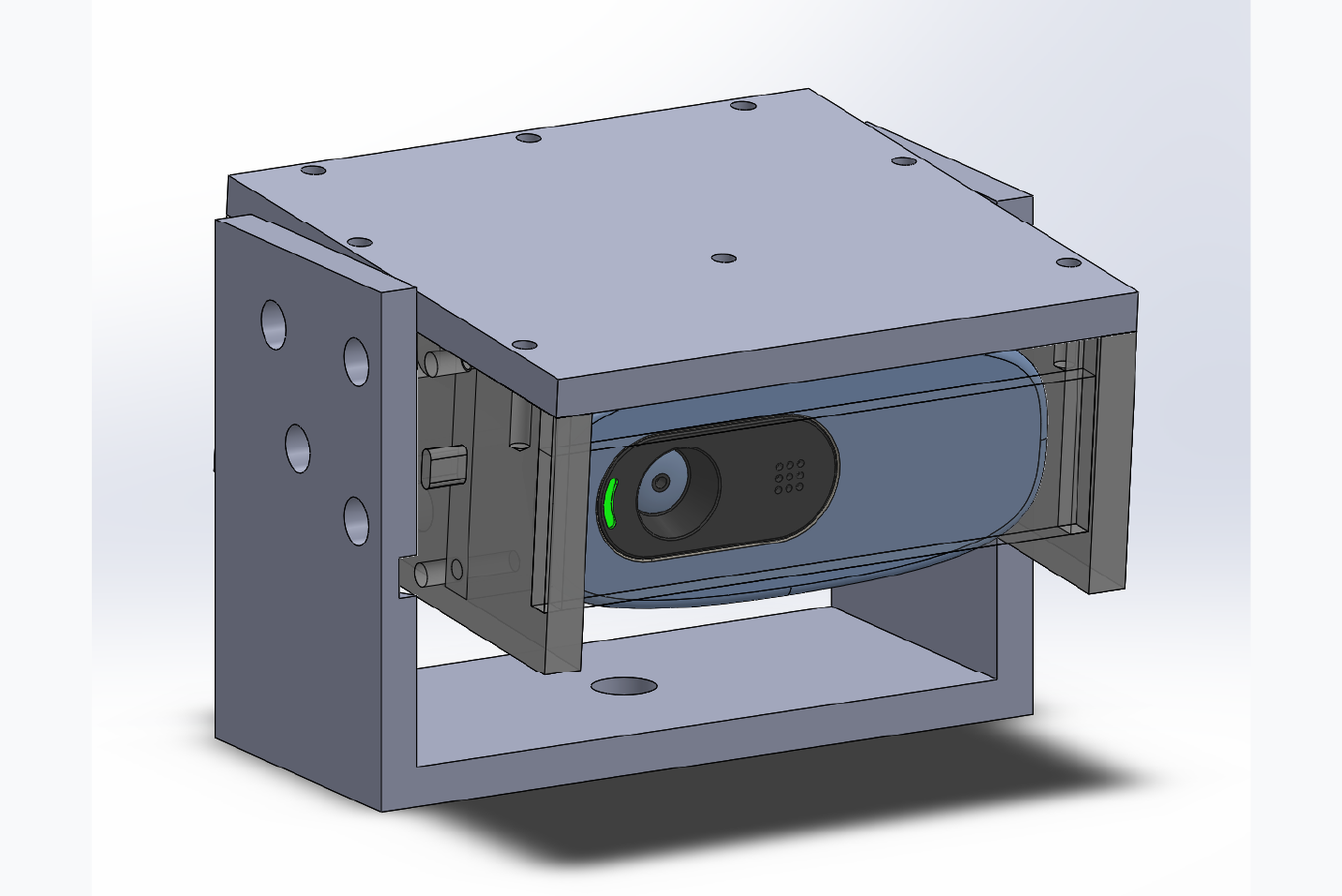
This week the first support for the cameras was ready as you can see
in the picture below. Some tests were also done again with the HUB, but this time on computers with
different operating systems. With these tests we found that the problem can be the drivers of the USB
ports on Linux, since on the same computer it was possible to pass two images in Windows and only one
in Linux. Despite this, in the Windows environment we only managed to pass the three images on a computer
with USB 3.1 ports.
Besides this I continued writing the dissertation.